





RDW is tasked with the formal approval of vehicle types and vehicle parts and therefore also with the approval of the autopilot function in vehicles with advanced driver assist systems (like their European approval of the Tesla Model 3 [Tech19]). In this article, we will discuss how RDW acts in this evolving area; and how they, now and in the future, approve, monitor and control self-driving vehicles as these are incomparable with their predecessors.

Gerard Doll has been employed at the Dutch Vehicle Authority RDW for more than 16 years, first as Director IT, and the last 3 years as Director Vehicle Regulation and Admission. His department is responsible for 40,000 European Type Approvals yearly, working with more than 40 technical services worldwide and doing business with more than 1,600 manufactures in 50 countries.

Gerben Feddes works for the Dutch Vehicle Authority RDW. His main task is to bridge the gap between innovation and automotive legislation. He initiated the exemption process for Field Operational Tests in the Netherlands. He feels at home in a changing world.
The first fully autonomous vehicles are already on the road
While the COVID-19 pandemic is causing less traffic on the roads globally, innovation in autonomous and/or electric vehicles at car manufactures continues unabated. Doll states that the Netherlands is among the European leaders making it legally and practically feasible to open its infrastructure as a test location to achieve rapid progress in this area. Cars with automated functions supporting the driver, such as adaptive cruise control, automatic parking, lane-keeping systems and intelligent speed adaptation are already driving the European roads (also known as Advanced driver-assistance systems, ADAS). However, these ADAS functions are not yet at the level of entirely self-driving vehicles like the ones that are currently being developed by car manufacturers like Tesla, Volvo, Waymo and Baidu ([KPMG18]). The driver is still fully responsible, both physically and legally, for the actual behavior of the vehicle.

Figure 1. Baidu’s self-driving cars are driving fully autonomous in China. [Click on the image for a larger image]
Other parts of the world already have self-driving cars driving on public roads, such as China. Baidu’s self-driving cars are completely autonomous, using advanced technology to navigate roads, stop at red lights, and avoid pedestrians and cyclists. In Europe, partly due to lagging laws and regulations EU, Member States are predominantly testing autonomous vehicles in the experimental phase. This is also the case in the Netherlands. As of 1 July 2015, public road tests involving self-driving vehicles are only allowed under strict conditions. RDW is working with parties like the Ministry of Infrastructure and Water Management, the Dutch police, road authorities, and the Dutch Institute for Road Safety Research (SWOV) to evaluate requests from stakeholders to conduct experiments with autonomous vehicles on the Dutch public road – all in conformity with the Exceptional Transport Exemptions Decree ([Over15]).
Recent examples of these pilot projects under Exceptional Transport Exemptions Decree legislation are truck platooning ([TNO17]), whereby several trucks drive in a convoy, closely and in sync behind each other without a driver, and the use of self-driving shuttle buses (e.g. WEpods in Wageningen and ParkShuttle in Rivium).
Moreover, since 1 July 2019, public road tests involving self-driving vehicles whose drivers are located ‘outside’ the vehicle are allowed, such as a remotely operated self-driving minibus ([Rijk19]). The tests are subject to several conditions and restrictions. For example, the traffic safety risks must be demonstrably minimized and the initiator properly insured. Furthermore, the tests to be conducted on a specific road or road section will be confined to a limited timeframe. Feedback regarding the outcomes of the experiment must be provided to the Dutch Vehicle Authority RDW.
Cat-and-mouse game between innovation and legislation
Doll and Feddes explain that past experiments have taught us that there are still many challenges to overcome before self-driving vehicles in the Netherlands can hit all public roads in the Netherlands. Technology is still very much under development and the current infrastructure is not ready for this yet.
Furthermore, due to a lack of legislation and the fact that insufficient guarantees have been agreed by which the car manufacturers must at least comply, it is almost impossible for (independent) oversight bodies to be able to sufficiently monitor all software updates which can drastically influence the behavior of vehicles. As [Krom17] already stated: “checking the ‘digital brains’ of vehicles should not be underestimated”.
So, is RDW putting technology advancement before a safe situation on public roads? Doll and Feddes explain that various initiatives are currently underway in which RDW makes a major contribution. The influence of software on vehicle behavior changes RDW’s role when issuing a European type approval which is a condition for any new vehicle to be allowed on the public road. A vehicle should no longer be judged on its traditional technical specifications but on its behavior, which more and more is controlled by software rather than the hardware. RDW is challenged to find a methodology to test these vehicles, assessing the full supply chain from OEMs to their suppliers to ascertain that approved cars are safe and secure.
As a response to this type-approval testing challenge, RDW is developing a new test center to perform independent tests for European and national admission including simulation and cyber tests on new vehicles. Furthermore, RDW is working with a broad group of stakeholders on standards and frameworks which should contribute to the legal admission of autonomous vehicles.
Some examples of frameworks that are currently under development are:
- Vehicle Safety & Security Framework (VSSF);
- Vehicle Driving License Framework (VDLF);
- Cyber Security Engineering Standard.
Vehicle Safety & Security Framework (VSSF)
As a response to the vast developments in the car industry RDW created the VSSF, supporting the smooth co-creation of legislation for autonomous vehicles.
RDW developed this framework by interacting with car manufacturers like Tesla, with which they discussed questions like:
- How are security and privacy arranged? How do software updates take place securely?
- How is the development process of these software updates controlled?
- What about the testing of such updates?
This learning experience resulted in a set of principles categorized in about 20 topics as depicted in Figure 2. Doll states that this VSSF is critical for RDW to design a method to evaluate the in-vehicle software of self-driving cars.
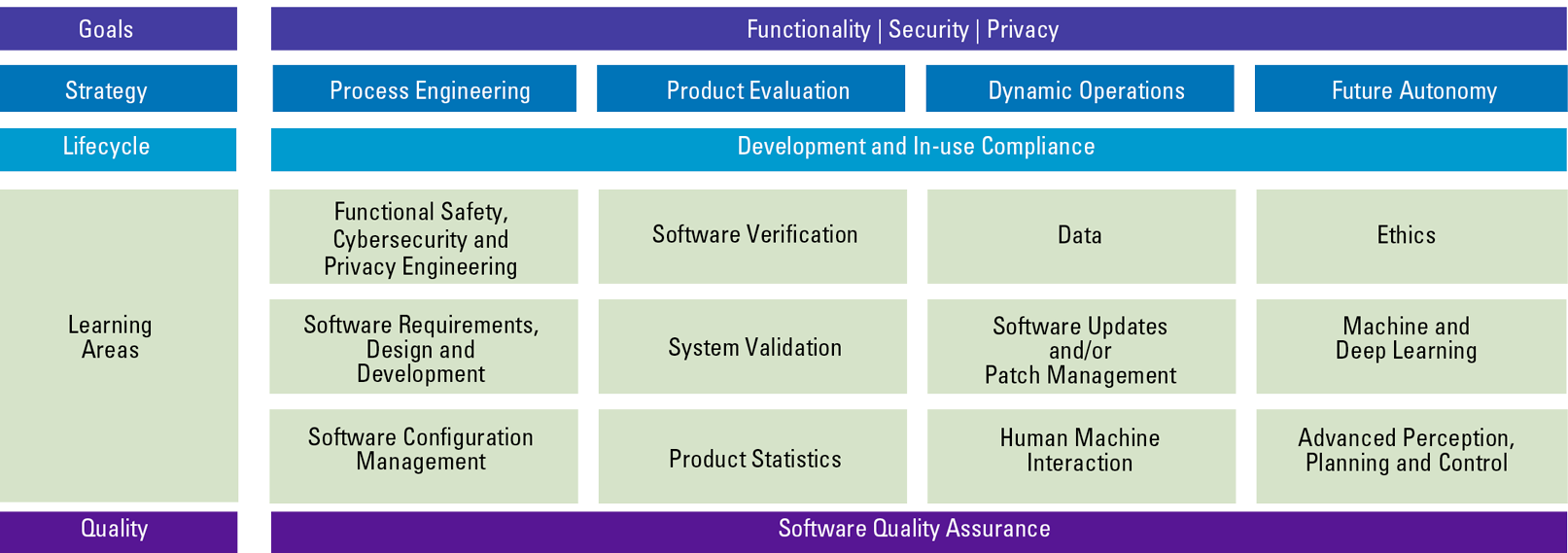
Figure 2. Vehicle Safety & Security Framework. [Click on the image for a larger image]
Vehicle Driving License Framework (VDLF)
Doll explains that we are entering an era in which many people will likely choose to be a passenger in their car rather than driving the car. This implies that drivers will not be driving the car and that their driver’s license might become superfluous in the future. The intelligent vehicle operating system will drive the vehicle in this scenario, in which case RDW will suggest that there should be a driving license for vehicles. RDW is collaborating with relevant stakeholders (i.e. CBR, Ministry of Infrastructure and Water Management, Rijkswaterstaat) to develop a Vehicle Driving License Framework (VDLF), which could lead to an international standard to license intelligent vehicles, especially for SAE levels 4 and 51.
In the current framework four (test) processes are proposed:
- Virtual Environment. The AI-driver ‘competes’ in a virtual environment against this average human driver. Knowledge (theory) and skills are tested and related to human performances and risk profiles in a similar environment.
- Proving Ground. A real-life test on a closed proving ground to assess the integration between hardware and software (see also [Rijk19]). Also, some virtual tests are validated.
- Driving Exam. Just as for humans, this test step is a driving exam on public roads to validate the behavior of the vehicle in complex traffic situations.
- In Service Conformity. Given the ever-changing software, monitoring is required when the vehicle is on public roads. Unsafe software updates, hacking or malicious software must be identified before use. This also includes the monitoring of traffic flow. Those vehicles that are detected as an anomaly need to be rechecked by auditors or banned from public roads.
Car manufactures can extend their license step-by-step, ultimately being allowed to drive autonomously on all roads (see Figure 3).
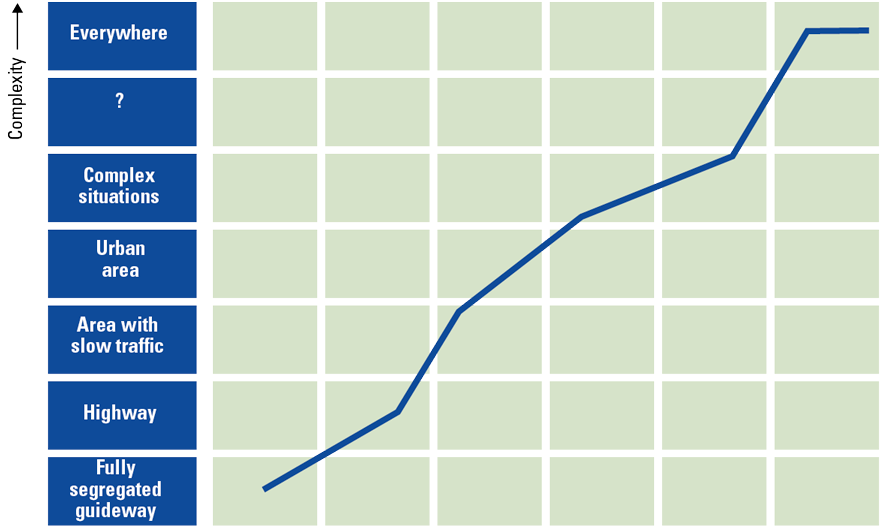
Figure 3. VDLF support the controlled release of autonomous vehicle functionalities. [Click on the image for a larger image]
Road Vehicles – Cyber Security Engineering
With the increase in connectivity in vehicles such as 5G and WIFI, the risks of cyberattacks and the subsequent damage also increases. Current safety-critical standards in the car manufacturing world are not enough to cover this type of risk and therefore new guidelines and standards need to be established.
The standard, which is currently under development, should help to enforce security safeguards in the future. Automotive product developers, OEMs, and their suppliers will need to comply with the standard before car owners can use their ADAS functions on the European roads. The standard will cover all stages of a vehicle’s lifecycle, from design to decommissioning. This will apply to all electronic systems, components, and software in the vehicle, plus any external connectivity.
The intention behind the standard is to provide a structured process to ensure that cybersecurity considerations are incorporated into automotive products throughout their lifetime.
Does RDW strike a balance between innovation and regulation?
The coming years will be crucial for developing new regulations, standards and frameworks, covering the whole autonomous vehicle chain including OEMs, suppliers, smart infrastructure manufactures, authorities, the vehicle and the driver. Doll states that robustness across the entire chain will be required, but that can be learned from other industries where safety is of utmost importance, like airline and medical.
In the meantime, RDW in cooperation with his ‘policy mother’, the Ministry of Infrastructure and Water Management, are taking risks to accommodate innovation in mobility. This is done in a controlled way by slowly allowing specific functionality to make traffic safer. And testing with fully autonomous vehicles is only done in predefined parts of the Netherlands in a controlled environment ([KPMG18]).
The outcomes of all the mentioned efforts will be used to review whether current legislation will be adequate at both the national and international levels, or whether further amendments will be required to accommodate the cars and the transport of the future.
The Netherlands is at the vanguard of the countries that are preparing for self-driving transport ([KPMG18]). Yet, Feddes and Doll both agree that due to the complexity of the mobility network, developments in new regulations, the lack of smart infrastructure (traffic lights that talk to cars) and the number of stakeholders involved, it will certainly take a decade or more before fully autonomous vehicles are allowed to drive on all public roads in the Netherlands.
This all implies that the situation for the coming years is clear: “Despite all the driving assistance we get from the smart technology in our vehicles, the driver remains fully responsible.”
Notes
- See also the article ‘So, here is the problem with self-driving cars’ in this Compact edition.
References
[KPMG18] KPMG International (2018 – 2020). KPMG-Autonomous-Vehicle-Readiness-Index. Retrieved from: https://home.kpmg/xx/en/home/insights/2020/06/autonomous-vehicles-readiness-index.html
[Krom17] Kromhout, P. & Groen, S. (2017). Autonomous driving cars are key for mobility in 2030. Compact 2017/4. Retrieved from: https://www.compact.nl/articles/autonomous-driving-cars-are-key-for-mobility-in-2030/.
[Over15] Overheid.nl (2015). Exceptional Transport (Exemptions) Decree. Retrieved from: https://www.internetconsultatie.nl/zelfrijdendevoertuigen/details
[Rijk19] Rijksoverheid.nl (2019). Groen licht voor tests met zelfrijdende voertuigen op de openbare weg. Retrieved from: https://www.rijksoverheid.nl/actueel/nieuws/2019/07/01/groen-licht-voor-tests-met-zelfrijdende-voertuigen-op-de-openbare-weg
[Tech19] Techcrunch.com (2019). The Tesla Model 3 is finally approved for European road. Retrieved from: https://futurism.com/the-byte/model-3-tesla-deliveries-europe
[TNO17] TNO (2017). Truck platoon matching paves the way for greener freight transport. Retrieved from: https://www.tno.nl/en/focus-areas/urbanisation/mobility-logistics/reliable-mobility/truck-platoon-matching-paves-the-way-for-greener-freight-transport/, 2017.